OSAM-2 Manipulator Simulation
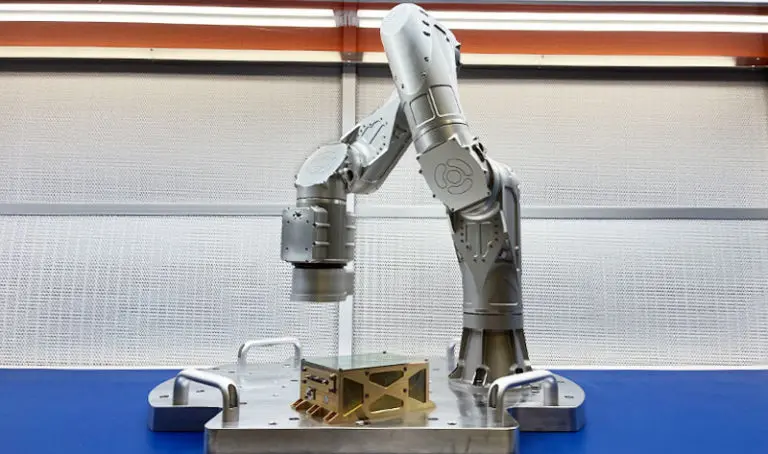
As part of a computational dynamics course, I simulated the manipulator featured on the OSAM-2 mission. The mission was designed to perform some testing of manufacturing and assembly techniques in Earth orbit, for which it was fitted with a small robotic manipulator. I developed a dynamic simulation for the arm ultimately determining link positions, velocities, accelerations, and reaction forces and torques. The simulation moved to approximate a trajectory featured in a published animation about the mission. Due to limited information available, many system parameters were estimated from examining available imagery and creating simplified models.